有差不多3个星期没有更新博客了,清明假期回了趟江西也是把我堵怕了。不过这段时间也抽空回顾了下隐马尔可夫(HMM),同时动手写了下算法,今天总算是整理地差不多了。
隐马尔可夫(HMM)模型描是一个关于时序的概率模型,描述由一个隐藏的马尔可夫链随机生成不可观测的状态随机序列,再由各个状态生成一个观测而产生观测随机序列的过程。下面来回顾一下吧!
隐马尔可夫(hidden Markov model)模型描是一个关于时序的概率模型,描述由一个隐藏的马尔可夫链随机生成不可观测的状态随机序列,再由各个状态生成一个观测而产生观测随机序列的过程。在写这篇博客的过程中,知乎上的相关问题提供了很多通俗易懂的讲解。可以参考知乎。
这里,我们先从一个直观的例子入手,了解一下隐马尔可夫的过程;然后从概念上进行一些解释;最后写代码进行实现。
先举个栗子
作为一个吃鸡玩家,就围绕吃鸡举个栗子吧。我们利用地图副本的天气状况(状态变量)、第一局随机到地图天气的概率(初始状态概率)和我们的最后取得的成绩(观测变量)构建一个HMM。
在这个模型中,假设地图天气状况3种,分别是晴天、黄昏和雨天(实际中已取消)。我们开始玩第一局的时候随机到每种天气的概率为(0.4,0.4,0.2),而接下来每局比赛的天气转换概率如图所示,比如这局是晴天,那么下局是晴天、黄昏、雨天的概率分别为0.5、0.3和0.2。而由于天气的不同,我们吃鸡队的游戏竞技状态也会有所变化,我们取得的成绩也就不一样。
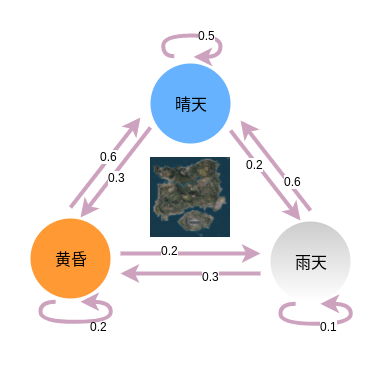
比如,我们比较擅长晴天,打进前10、10-20和20以后的概率分别为0.6、0.3、0.1;黄昏天由于光线原因,打进前10、10-20和20以后的概率分别为0.3、0.5、0.2;而雨天由于视野和雨点噪声影响,打进前10、10-20和20以后的概率分别为0.2、0.5、0.3。
根据上面的信息,我们其实可以得到HMM的一些基本要素,初始状态分布 $\pi$ 、状态转移分布 $A$、观测概率分布 $B$。
3位朋友听说了我和队友今天在吃鸡,分别提出3个问题:
- 1.朋友A已知了HMM模型的参数,了解到我们连续5局的成绩分别是:(5,10,23,15,1),他希望计算出我们打出这个成绩的概率是多少;
- 2.朋友B只知道我们连续5局的成绩,他希望估计出HMM模型的三个参数 $(\pi,A,B)$;
- 3.朋友C已知了HMM模型的参数和我们连续5局的成绩,她希望能猜测出这5局的地图天气分别是什么;
最后一局终于吃鸡,上张吃鸡图。
基本概念
HMM模型由初始状态概率向量 $\pi$ 、状态转移矩阵 $A$、观测概率矩阵 $B$ 组成。$\pi$ 和 $A$ 决定了状态序列,$B$ 决定了观测序列,这三个参数称为HMM的三要素。
可以看出来,HMM做了两个基本假设:
- 1.齐次马尔可夫性假设:隐藏的马尔可夫链在任意时刻 $t$ 的状态只依赖于前一时刻的状态,与其他时刻的状态及观测无关;
- 2.观测独立性假设:即任意时刻的观测只依赖与该时刻的马尔可夫链的状态,与其他观测及状态无关;
HMM模型的三个基本问题是:
- 1.概率计算问题:给定模型 $(\pi,A,B)$ 和观测序列 $(o_{1},o_{2},…,o_{T})$,计算在这个模型参数下得到该序列的概率;即吃鸡例子中该出这个成绩的概率是多少?
- 2.学习问题:已知出现的观测序列 $O=(o_{1},o_{2},…,o_{T})$,估计模型参数 $\lambda=(\pi,A,B)$,使得在该模型下观测序列的概率 $P(O|\lambda)$ 最大。不知道大家有没有发现,这其实就是一个可以运用EM算法解决的场景;即吃鸡例子中希望估计的模型参数;
- 3.预测问题:也成为解码问题,已知模型参数 $\lambda=(\pi,A,B)$ 和观测序列 $O=(o_{1},o_{2},…,o_{T})$,求对给定观测序列条件概率 $P(O|\lambda)$ 最大的状态序列 $I=(i_{1},i_{2},…,i_{T})$,就是说给定观测序列,求最有可能对应的状态序列;即吃鸡例子中预测处5局的天气分别是什么。
问题解法
概率计算问题
对于这个问题,依照齐次马尔可夫性假设,我们可以按照实际观测罗列出所有的状态路径,然后求各个状态与观测序列的联合概率,最后对所有可能的状态序列求和,得到条件概率 $P(O|\lambda)$。但是我们可以想想到的是,当状态维度、时序长度增大时,这个方法的计算量是很大的,有 $O(NT^{N})$ 阶,是不可行的。下面简单介绍下实际可行的前向-后向算法。
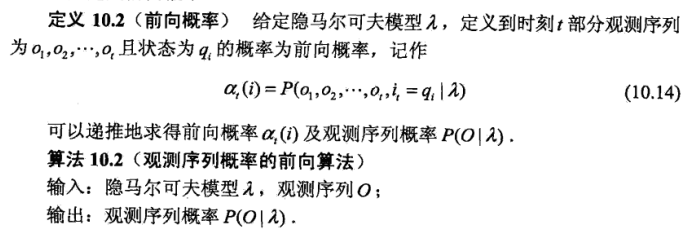
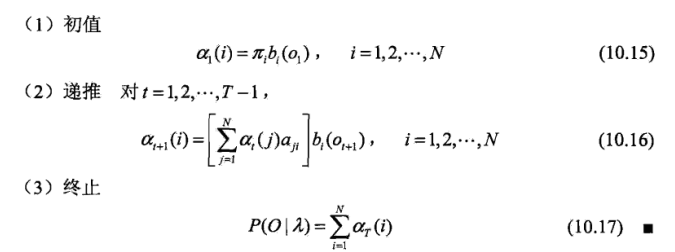
首先讲前向算法
给定HMM的 $\lambda$,定义到时刻t部分的观测序列为 $o_{1},o_{2},…,o_{t}$ 且状态为 $q_{i}$ 的概率为前向概率,记作 $\alpha_{t}(i)=P(o_{1},…,o_{t},i_{t}=q_{i} \ | \ \lambda) $。
现在我们知道5局的成绩是(5,10,23,15,1),先计算第1局获得前10成绩的概率,如果是晴天,根据条件概率则
如果是黄昏,则
如果是雨天,则
接下来计算第2局时获得前10的概率,首先如果第2局是晴天,那么:
如果第2局是黄昏,那么:
同样如果第2局是雨天,那么:
如此下去可以继续计算第3局的情况。可以看出,前向算法计算了每个时间点,每个状态的发生观测序列的概率,在观测时序长度增大时,复杂度会大大降低。前向算法的公式可以参见《统计学习方法》中的P175。算法过程如下图:
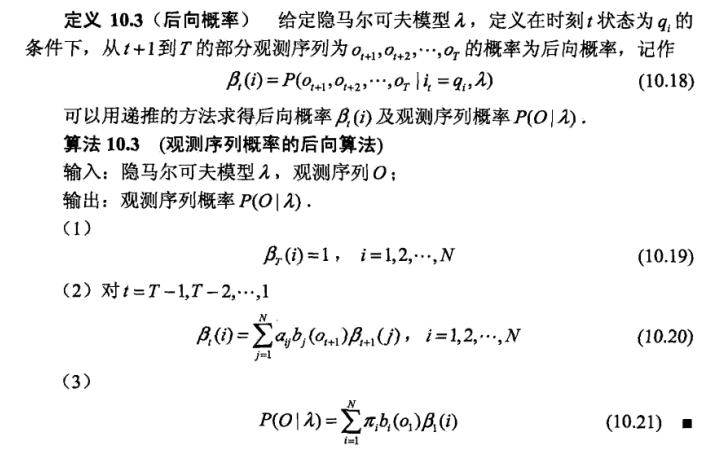
与前向算法不同,后向算法则是倒退着,从最后一个状态开始慢慢往后推。
给定HMM的 $\lambda$,定义在时刻 $t$ 状态为 $q_{i}$ 的条件下,从 $t+1$ 到 $T$ 部分的观测序列为 $o_{t+1},…,o_{T}$ 的概率为后向概率,记作 $\beta_{t}(i)=P(o_{t+1},…,o_{T} \ | \ i_{t}=q_{i},\lambda)$
假设观测序列长为 $T$,后向算法为 $\beta_{T}(i)=1$,这是因为 $T$ 后没有观测值了。那么在第4局游戏中天气为黄昏的状态下,第5局前10的后向概率可以计算为:
后向算法的公式可以参见《统计学习方法》中的P178。算法过程如下图:
利用前向概率和后向概率的定义,可以将观测序列概率 $P(O|\lambda)$ 统一写为:
参数学习问题
对HMM模型的参数学习问题本质上是一个存在隐变量的参数估计问题,可以用非监督学习算法Baum-Welch算法(也就是EM算法)来做。具体的过程博主并未实际推导,求得的结果参数可以参考《统计学习方法中》的10.3.3章节的三个式子。
预测问题
HMM可以使用维特比算法来进行状态预测。维特比算法实际是用动态规划解HMM模型预测问题,即用动态规划求概率最大的路径,这个时候的一条路径就对应一个状态序列。
对于已知的模型参数 $\lambda=(A,B,\pi)$ 和观测 $O=o_{1},…,o_{T}$,维特比算法的步骤是:
- 1.初始化
- 2.递推,对于 $t=2,3,…,T$,有
- 3.终止
- 4.最优路径回溯,对于t=T-1,…,1,求得最优路径 $I^{}=(i_{1}^{},…,i_{T}^{*})$。
代码实现
以下代码是按照《统计学习方法》中的算法步骤实现的,代码对应的公式也有注释。注:隐状态预测代码待补充。
1 | import numpy as np |
定义HMM类,包括了上述的三种问题求解的方法。
1 | class HMM(object): |
概率计算问题
1 | # 定义状态转移矩阵,即地图三种天气的状态转换 |
前向概率: 0.005115324
后向概率: 0.005115324
参数学习问题
1 | observe = [0, 1, 2, 2, 1, 1, 0, 2, 1] |
learning
step: 1
step: 2
step: 3
step: 4
step: 5
step: 6
step: 7
step: 8
step: 9
step: 10
learning done
初始状态概率向量:
[1.49529045e-05 9.99985047e-01 5.03432572e-13]
状态转移矩阵:
[[1.91880239e-01 5.57882397e-05 8.08063973e-01]
[1.70532635e-03 1.76861116e-13 9.98294674e-01]
[1.68273868e-01 1.19887600e-01 7.11838432e-01]]
观测概率矩阵:
[[2.85459304e-01 7.25724096e-02 6.41968286e-01]
[9.99774837e-01 3.54499362e-05 1.89713434e-04]
[8.22150576e-03 6.25644638e-01 3.66133857e-01]]